Bouw onderarm en hand InMoov robot Hogeschool Zuyd
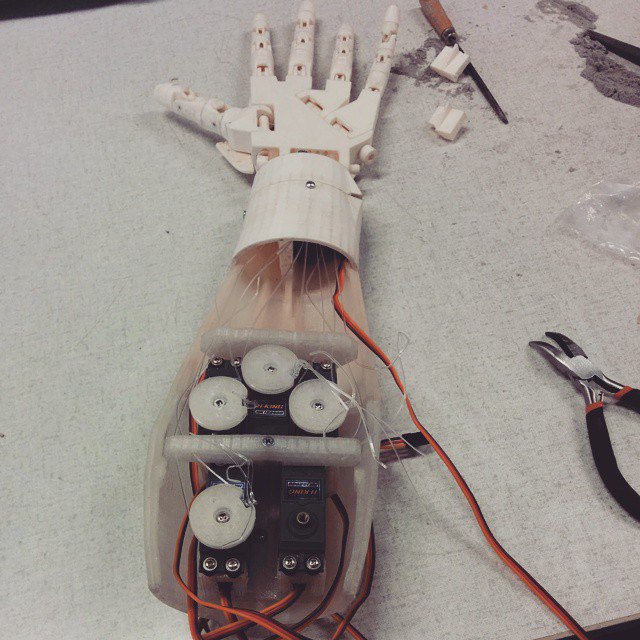
Proces Er is begonnen met het 3D printen van alle onderdelen en het verzamelen van de benodigde componenten. Vervolgens zijn de onderdelen in elkaar gezet en zijn de servo’s geïmplementeerd. De hand van de robot werd bestuurd d.m.v. 6 servo’s die verdeeld werden over de gehele onderarm. De vingers werden bewogen door gitaarsnaren aan te trekken die om de servo’s gewikkeld werden. De servo’s werden op hun beurt aangestuurd door een Arduino die werd gevoed met een labvoeding.
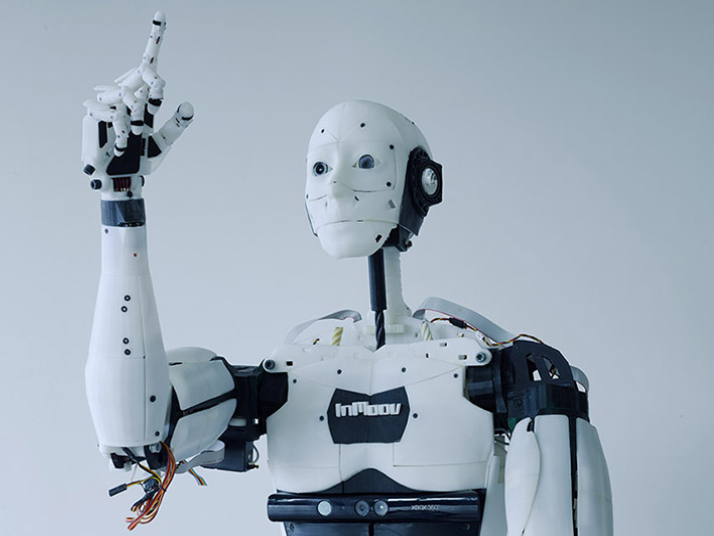
Als extra feature bij de oplevering zijn er RGB LED’s toegevoegd die d.m.v. kleuren de status van de robotarm weergeven en druksensoren waarmee bepaald kon worden of de hand gesloten was of open. Ook werden bepaalde bewegingen voorgeprogrammeerd zoals een vuist maken, vingers strekken, pols bewegen en alleen wijsvinger naar voren wijzen.